Duy P. Nguyen
ECE, Princeton University. duyn@princeton.edu

Princeton University
Electrical and Computer Eng
Engineering Quad, Room B204
I am a PhD Candidate in Electrical and Computer Engineering at Princeton University, advised by Prof. Jaime Fernández Fisac in the Safe Robotics Lab.
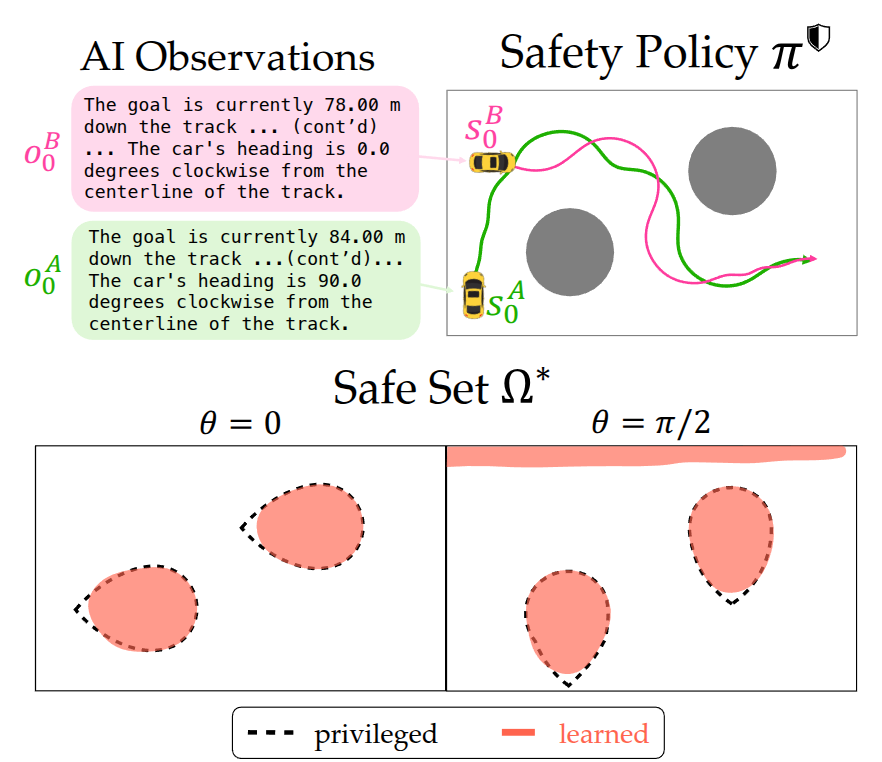
My research focuses on scaling safe reinforcement learning for high-dimensional robotic systems, enabling robots to operate robustly in the real world and collaborate effectively with humans. To this end, I develop learning and control frameworks that leverage world models, adversarial imagination, and closed-loop foundation-model fine-tuning, aiming to bridge the gap between theoretical safety guarantees and real-world deployment.
I ground my work in both academic and industrial settings, ranging from closed-loop RL fine-tuning pipelines for autonomous driving developed during my internship at Waymo, to real-time introspective safety mechanisms field-tested in the DARPA LINC program.
I am currently on the job market and actively seeking full-time opportunities in robotics and autonomy, as well as research collaborations.
news
latest posts
| Nov 08, 2024 | CoRL 2024 Demo Recap |
|---|